An unmanned aerial vehicle (UAV) (or uncrewed aerial vehicle, commonly known as a drone) is an aircraft without a human pilot onboard and a type of unmanned vehicle. UAVs are a component of an unmanned aircraft system (UAS) which includes a UAV, a ground-based controller, and a system of communications between the two. The flight of UAVs may operate with various degrees of autonomy: either under remote control by a human operator or autonomously by onboard computers.


Task Scheduling Optimization
- Main concern: Finding an optimal sequence of tasks for UAV plays a critical role in maximizing profits while minimizing costs
- Research Goal: Develop a finite state machine-based algorithm to solve for the optimal task scheduling problem
- Formulated the traveling salesman problem (TSP)
- Solve by integer linear programming (ILP) and Hierholzer’s algorithm
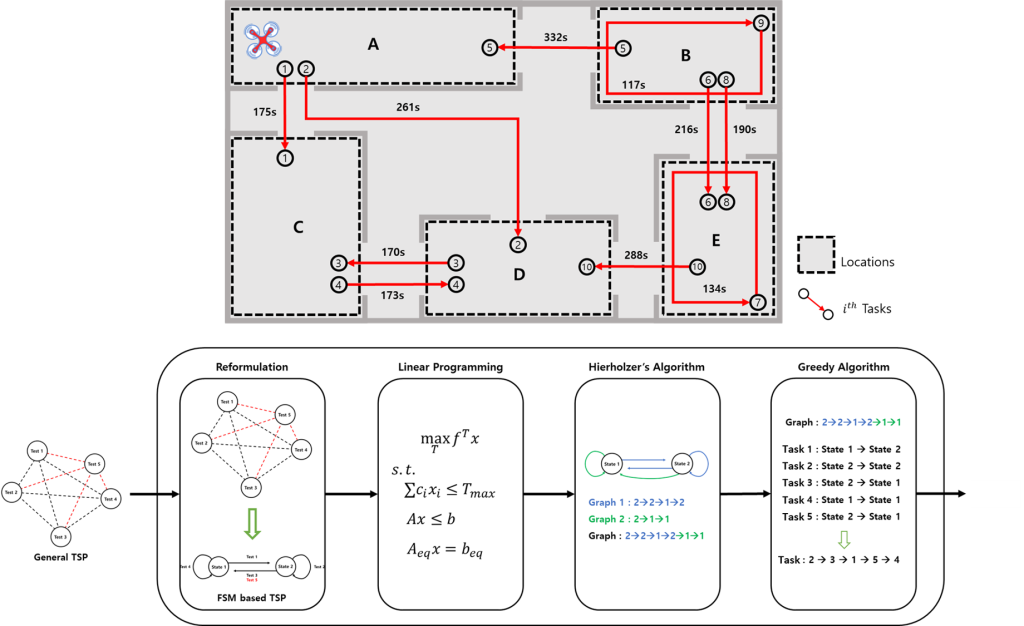
- Illustrative Example: Numerical simulation results comparing the computing time with other methods

Fault Tolerant Planner
- Main concern: Conventional fault tolerant controller does not guarantee the stabilization of faulty quadrotor when rotor saturation is considered
- Research Goal: Develop fault tolerant motion planner subject to complete rotor failure and saturation constraints
- Utilize the idea of periodic equilibrium
- Accounts for rotor failure and controller capacity
- Suitable for run-time operation
- Agnotstic to the embedded fault tolerant controller
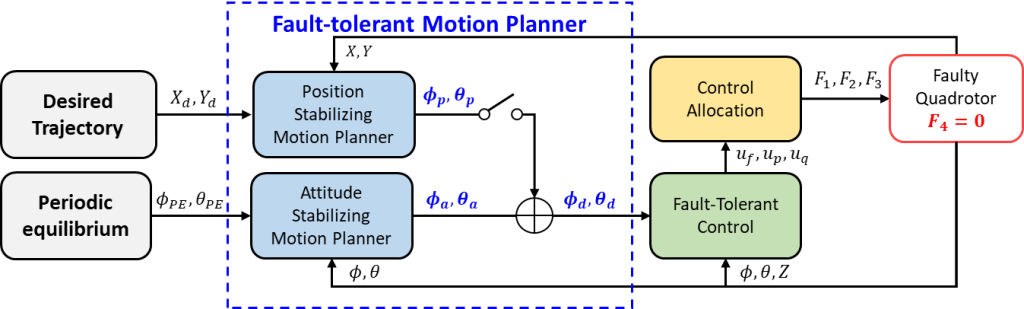
- Illustrative Example: Numerical simulation of fault tolerant motion planner applied to faulty quadrotor

Optimal Landing Pad Design
- Main concern: “Reference volume” has been introduced for the VTOL landing procedure for the AAM by the EASA. “H” and “V” marker has been adopted for manned flight; however, a general landing pad has not been proposed yet in the perspective of autonomous landing
- Research Goal: Optimal landing pad design for vision-based autonomous landing precision of AAM
- Fiducial marker-based landing pad with robust estimation and expandable hierarchical design for sequential landing procedure
- Propose pad design framework to guarantee area-to-area point-of-view performance during the landing maneuver, which meets the international standards
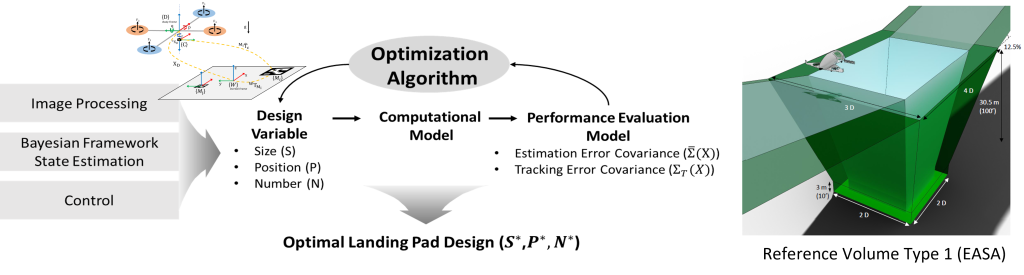
- Illustrative Example: Alternating direction method of multipliers (ADMM) inspired optimal landing pad design result

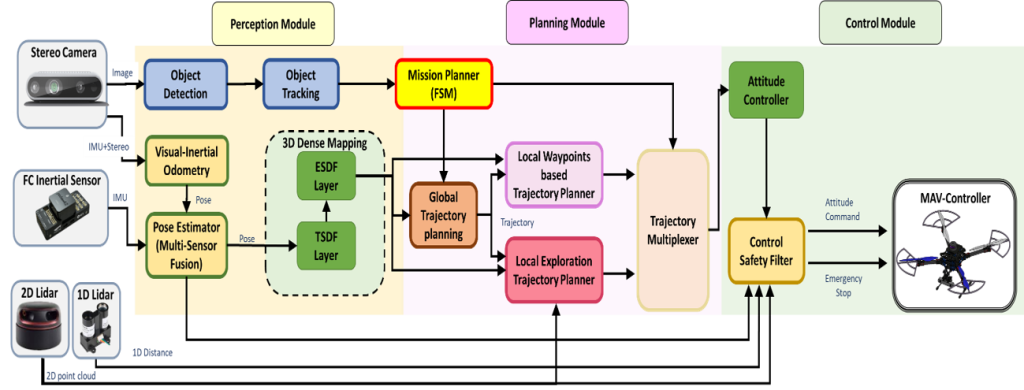
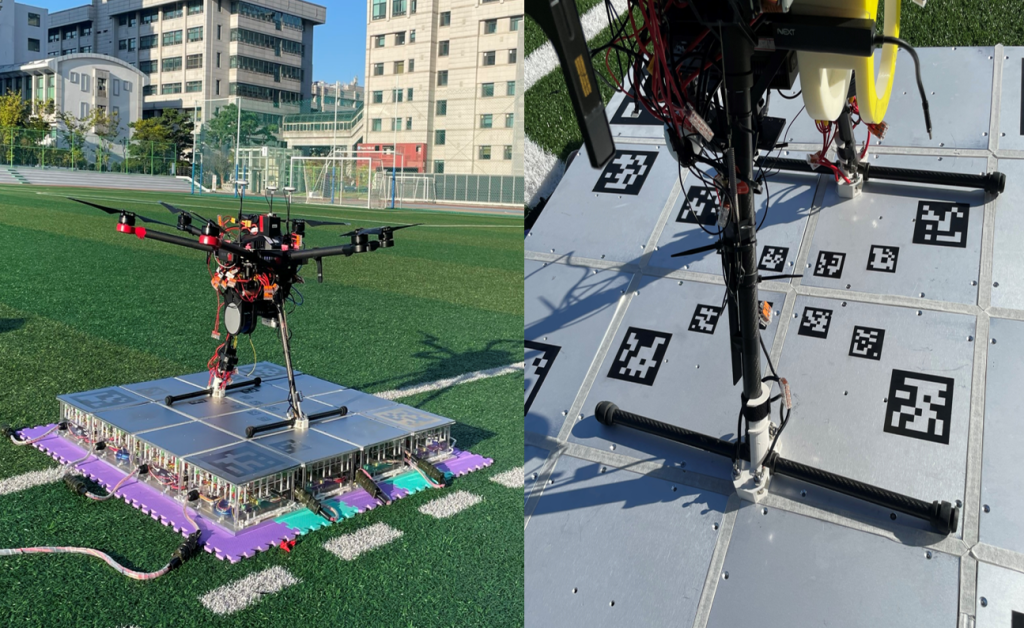
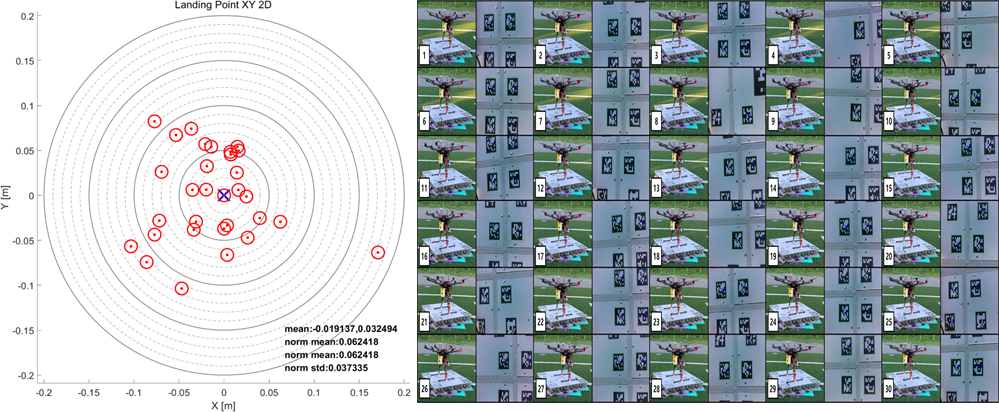
Autonomous Landing
- Main concern: Autonomous landing on top of the landing station using GPS/INS navigation alone is unsuitable because GPS can have bias up to several meters
- Research Goal: Development of autonomous precision landing algorithm using camera and LiDAR sensor
- Estimation performance should be guaranteed during the landing procedure, being robust against observation errors such as illumination and occlusion
- The control performance should also be guaranteed, even under various environmental conditions such as wind gusts and ground effect
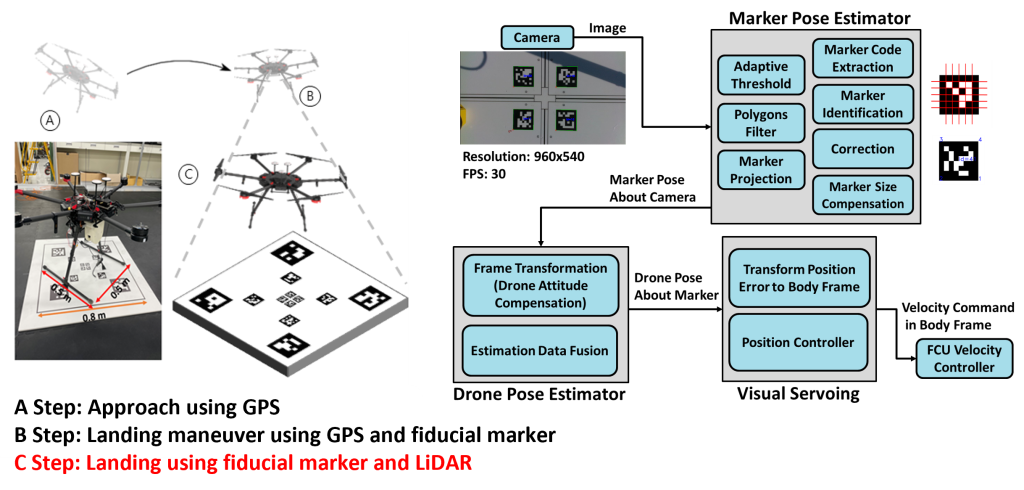
- Illustrative Example: SILS/Indoor/Outdoor developed autonomous landing algorithm verification




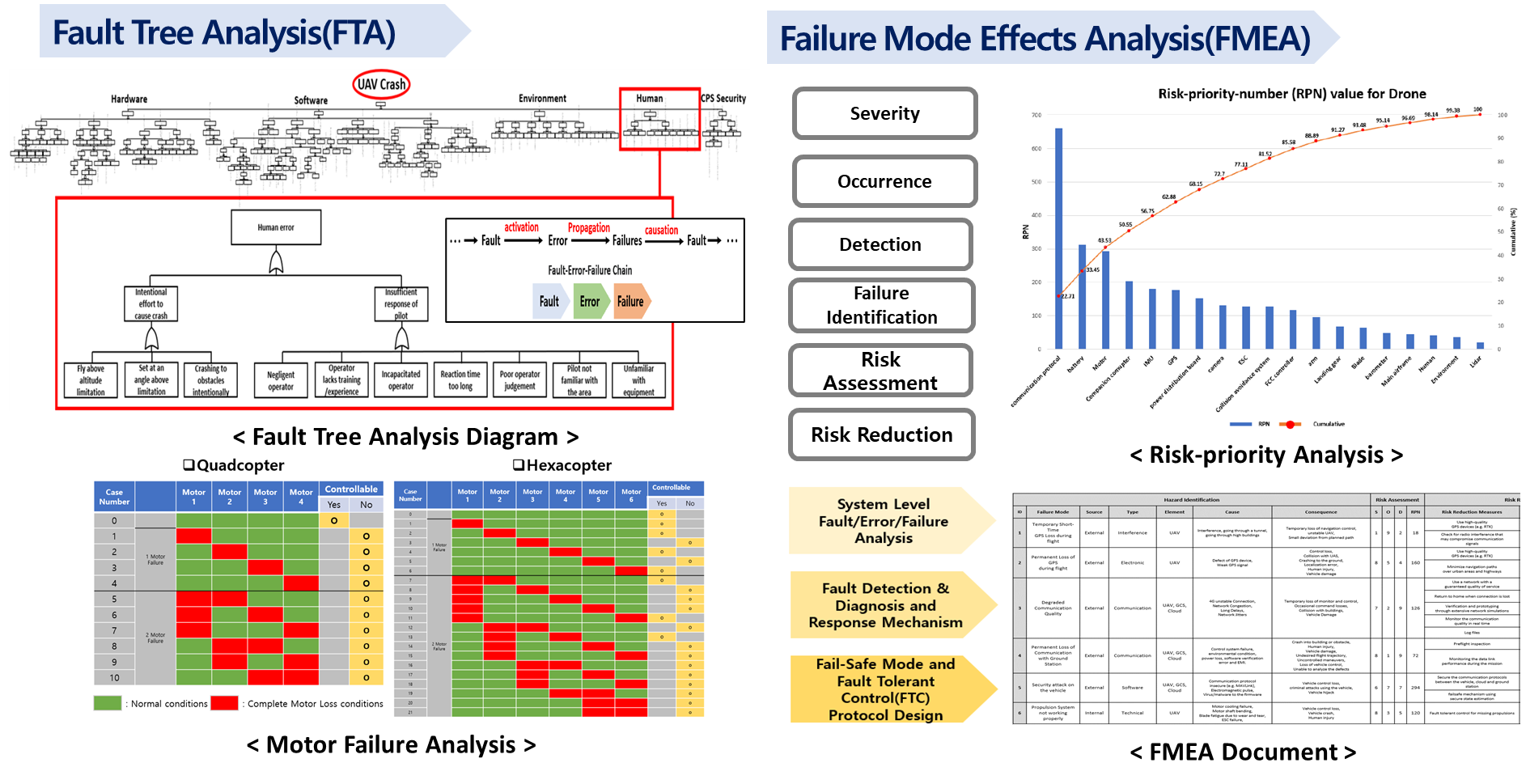
Advanced Air Mobility (AAM) Development
- Main concern: The software development process of unmanned aerial vehicles is not documented as properly as manned vehicles in terms of airworthiness and safety
- Research Goal: High-assurance autonomous flight control S/W development
- Reliability secured controller design through dynamics-based analysis and simulation
- Flight control health monitoring system study and S/W design through the analysis of failure types such as fault tree analysis(FTA) and failure mode and effects analysis(FMEA)
- Illustrative Example: AAM development process