CPS research has been strongly motivated by difficult and interesting real-world problems. In years to come there will be an increasing demand for my control domain approach to address the CPS complications. In particular, Unmanned Aircraft System (UAS) is an important CPS example in both military and civilian uses, but there have been only few works accounting for the complex inter-dependencies between its on-board automations and physical dynamics. It is worth noting our research on UAS is one of the first few works and is pioneering in this area. Other than UAS, we investigate diverse CPS applications that are characterized by their mobility, such as Air Traffic Management (ATM) / UAS Traffic Management (UTM), advanced driving assistant system (ADAS), autonomous driving, ground transportation management, and more.

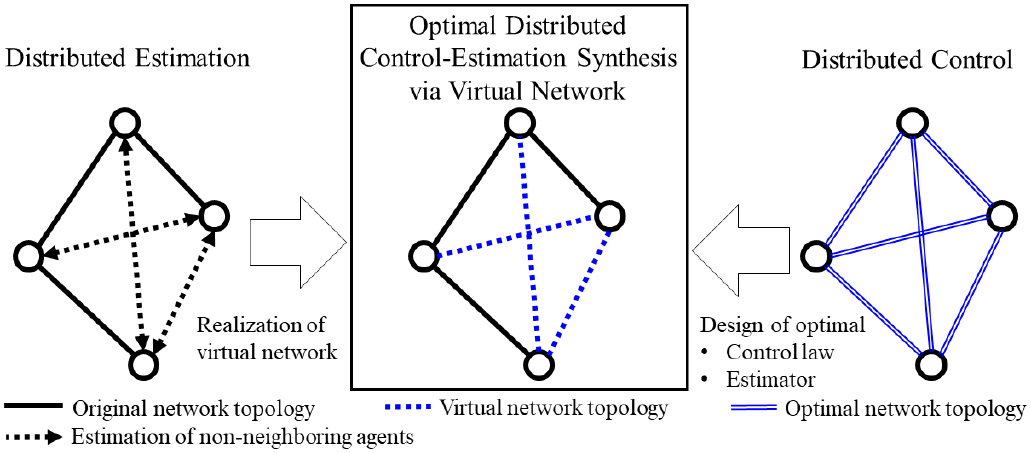
Distributed Optimal Control in Multi-Agent Systems
- Main Concern: Due to the network topological constraints in Multi-Agent Systems(MAS), proving optimality of distributed linear quadratic control is challenging.
- Research Goal: Develop optimal control laws in MAS by Circumventing structural network constraints.
- Elaborate on the distributed estimation-based control
- Utilize only raw data from the onboard sensors
- Eliminate necessity for additional data transmission through inter-agent communication, thereby reducing the overhead
- Characteristics of non-communication improve practicality and efficiency in real-world MAS operations
- Illustrative Example: Experimental results comparing the performance of formation maneuvering with other methods
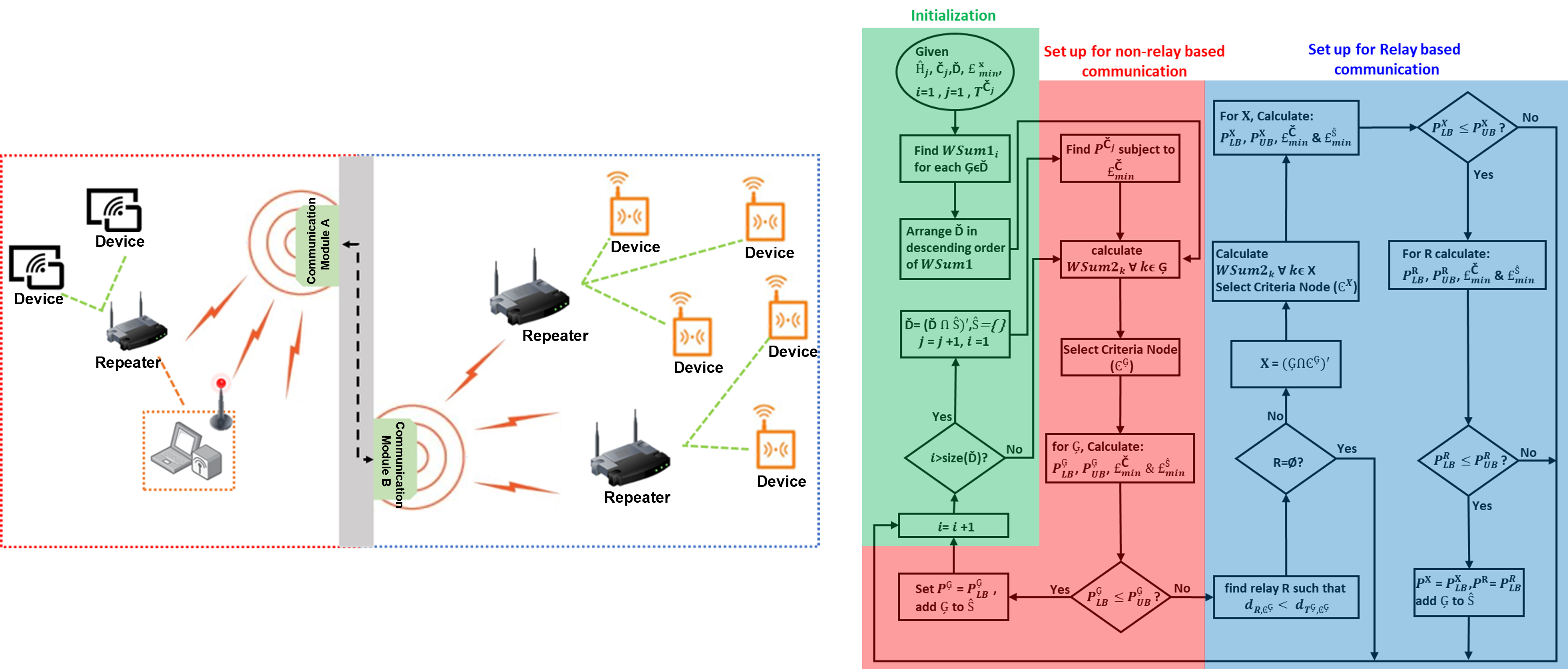
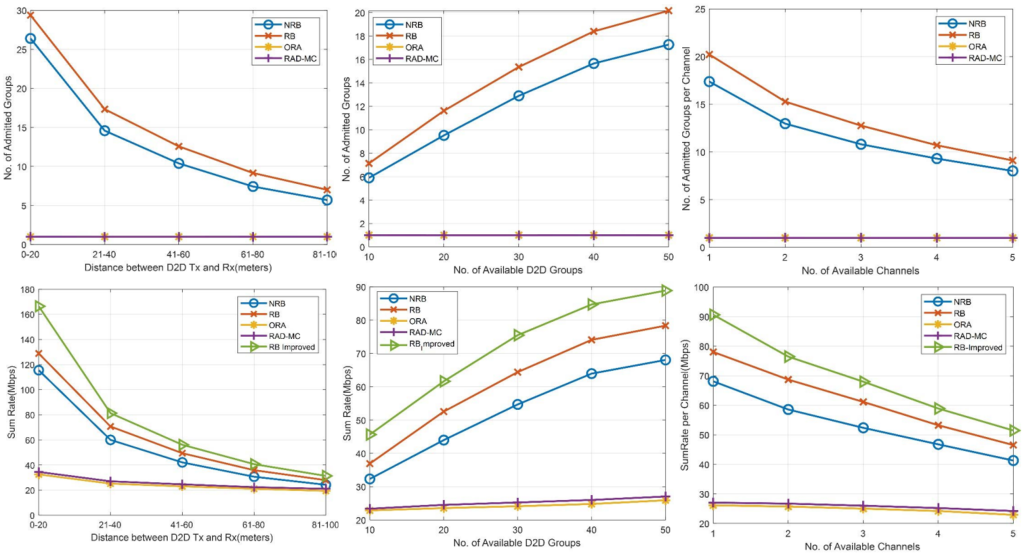
Transmission Power Control for Device-to-Device Communication
- Main Concern: Device-to-Device (D2D) communication can improve spectral efficiency by enabling proximity users to communicate directly without traversing the Base Station. However, if not designed properly, the interference generated by D2D transmissions may deteriorate the communication quality of the existing cellular and D2D users.
- Research Goal: Develop transmission power control-based interference management
- Increased access rate and sum rate
- Guarantees the Quality of Service requirements for both D2D and cellular users
- Illustrative Example: Comparison results of proposed algorithm in terms of access rate and sum rate
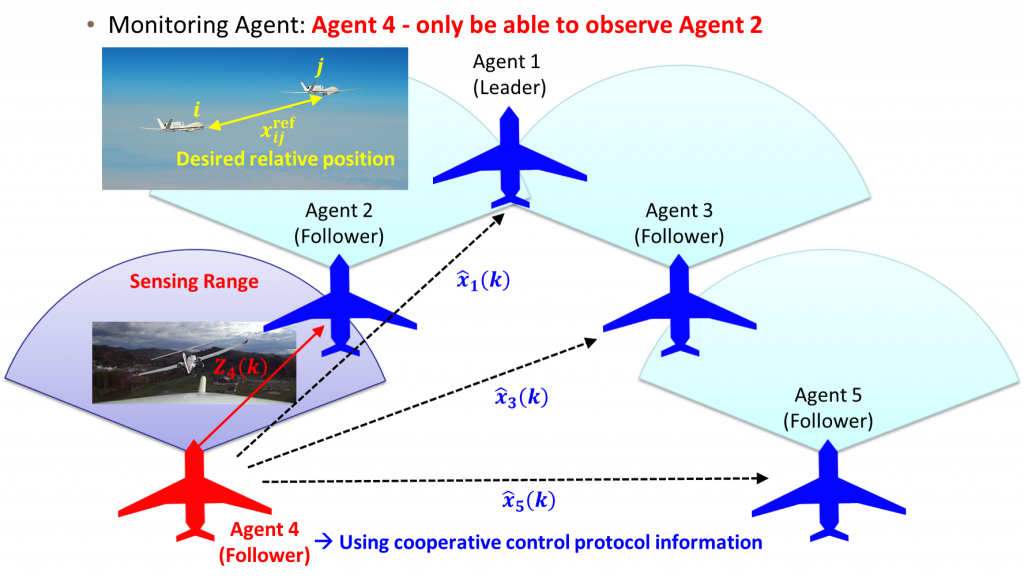
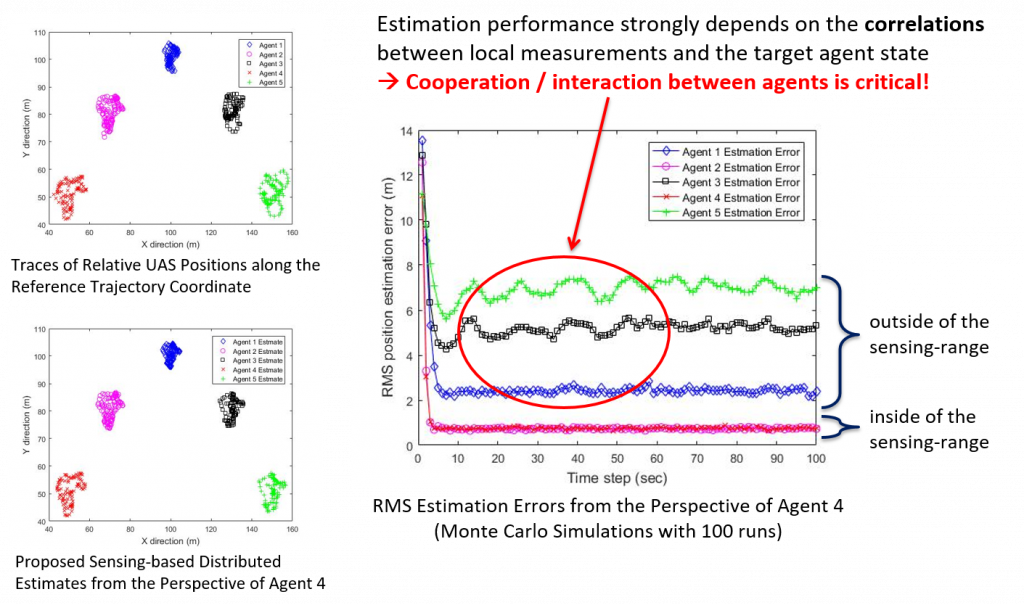
Distributed Estimation for Multi-UAS Coordination
- Research Goal: Development of a sensing-based estimation algorithm to estimate the UAS agent which is outside of the sensing range
- Key Idea: Focused on the dynamical cooperation between in-range and out-of-range agents in the sense that the information of unobservable agents can be indirectly obtained from the observed agents whose behaviors possibly interact with them
- Multi-UAS Formation Flight subject to Limited Sensor Observation
- Track the position of each UAS agent from the perspective of Agent 4, both inside the sensing range (Agent 2 and 4 itself) and outside the sensing range (Agents 1, 3, and 5)
- Monitoring Agent (Agent 4) is only be able to observe Agent 2
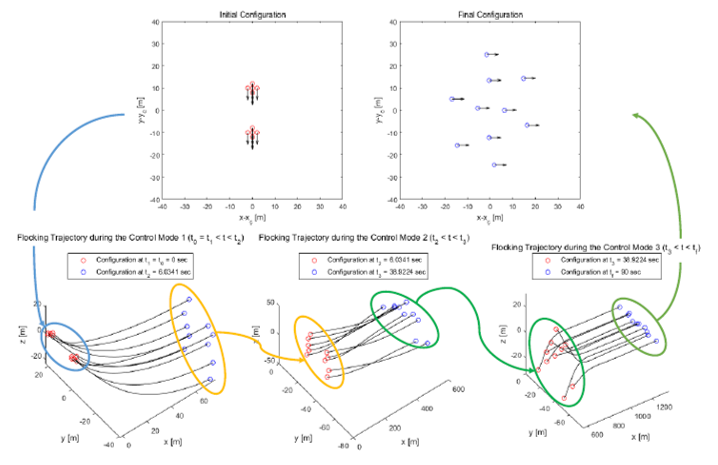
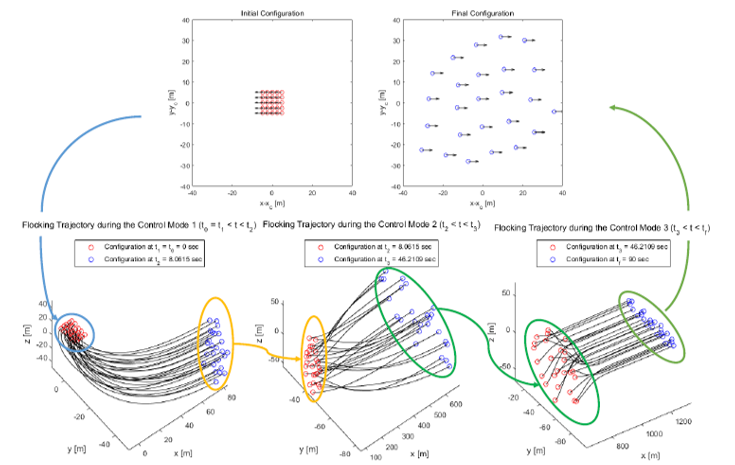
Decentralized Flocking Control of Fixed-Wing Aircraft
- Research Goal: Flocking control algorithm for fixed-wing aircraft to simultaneously address different constraints: i) non-holonomic constraints; ii) speed limit; and iii) conflict avoidance, while accommodating efficient use of airspace
- Hybrid Flocking Control Algorithm: Hybrid flocking control algorithm with three modes of decentralized flocking control protocol and a state-dependent switching logic
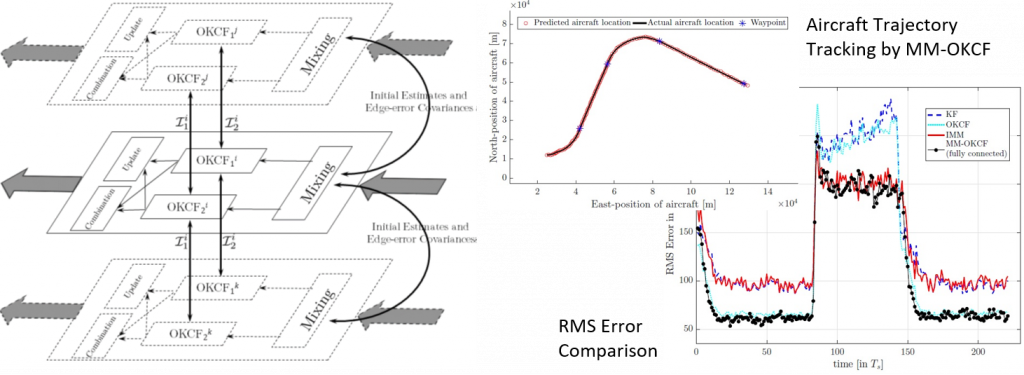
Distributed Hybrid Estimation over Sensor Network
- Research Goal: Develop a distribute hybrid state estimation by integrating the multiple model based approach with the optimal Kalman consensus filter (OKCF)
- Multiple Model-Optimal Kalman Consensus Filter (MM-OKCF): Exploits the mode-wise edge-error covariance exchange between neighboring agents
- Illuatrative Example: Aircraft tracking with different sensor network toplogies
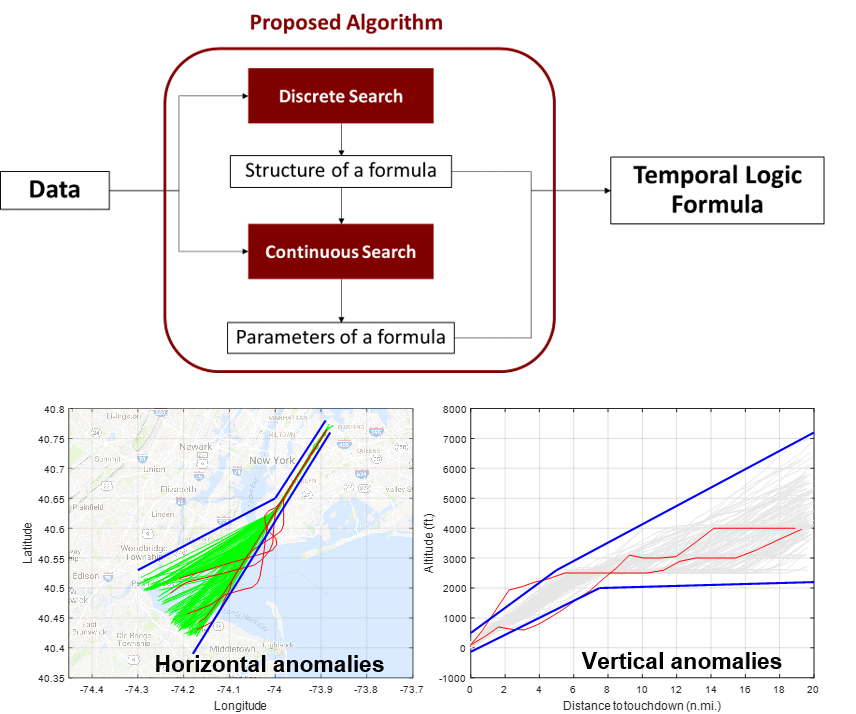
Anomaly Detection in Air Traffic Management
- Research Goal: Develop an unsupervised machine learning framework to effectively identify a priori unknown safety threats or emerging risks based on large amount of aviation data
- Temporal Logic Learning based Anomaly & Precursor Detection Algorithms
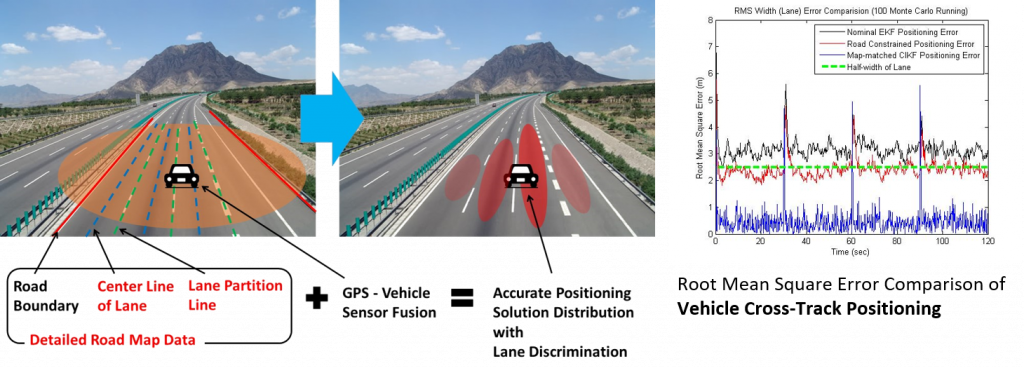
Constrained Hybrid Estimation for Road Vehicle Positioning
- Research Goal: Integration of global positioning system (GPS), vehicle dynamics and road map data for the vehicle positioning used in automobile navigation applications
- Constrained Stochastic Hybrid System Framework
- Incorporate detailed map information into the vehicle positioning
- Accurate vehicle positioning (continuous state) + lane discrimination (discrete mode)